Driving Training-Based Optimization (DTBO) algorithm is a metaheuristic algorithm based on the simulation of driving training process. Improved version of the DTBO is proposed in this paper for solving Optimal Power Flow (OPF) problem. The Improved Driving Training-Based Optimization (IDTBO) algorithm includes the Crowding Distance Technique for more diverse driver and learner selection and incorporates the Levy Flight distribution for better exploration and local optima avoidance. OPF is considered as one of the most difficult optimization problems and is very important for the control of electrical network. The objective of this study is finding the best control variables while minimizing the total generation fuel cost and considering equality and inequality constraints of the system. The standard IEEE 30-bus network is used for evaluating the performance of the IDTBO algorithm for solving OPF problem. For solving conventional power flow equation, Newton Raphson algorithm is considered. Compared to Modified Driving Training-Based Optimization (MDTBO), Teaching Learning-Based Optimization (TLBO) and Particle Swarm Optimization (PSO) algorithms, the proposed method is more accurate and is better in convergence speed. The performance of the IDTBO is very useful for finding the most secure operating point of any electric power system and its convergence speed contributes to improving the dynamic management of a smart electricity grid.
| Published in | American Journal of Engineering and Technology Management (Volume 11, Issue 3) |
| DOI | 10.11648/j.ajetm.20261103.11 |
| Page(s) | 31-41 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2026. Published by Science Publishing Group |
Electrical Network, Optimal Power Flow, Improved Driving Training-Based Optimization, Levy Flight, Crowding Distance, Fuel Cost, Newton Raphson Method
Bus Type | Specified variables | Desired variables |
|---|---|---|
PQ bus |
| , |
PV bus |
| , |
Slack bus | , |
|
Variables | Min | Max | Initial case | PSO | TLBO | MDTBO | IDTBO |
|---|---|---|---|---|---|---|---|
| 50 | 200 | 99.2225 | 177.3006 | 177.0567 | 176.9336 | 176.6836 |
| 20 | 80 | 80 | 48.7654 | 48.6972 | 48.6810 | 48.7035 |
| 15 | 50 | 50 | 21.3155 | 21.3043 | 21.2255 | 21.2130 |
| 10 | 35 | 20 | 20.8126 | 21.0814 | 20.9396 | 20.9662 |
| 10 | 30 | 20 | 11.8358 | 11.8842 | 11.7209 | 12.0235 |
| 12 | 40 | 20 | 12.1574 | 12.000 | 12.6520 | 12.4609 |
| 0.95 | 1.1 | 1.0500 | 1.1000 | 1.1000 | 1.1000 | 1.1000 |
| 0.95 | 1.1 | 1.0400 | 1.0873 | 1.0879 | 1.0876 | 1.0882 |
| 0.95 | 1.1 | 1.0100 | 1.0613 | 1.0617 | 1.0608 | 1.0614 |
| 0.95 | 1.1 | 1.0100 | 1.0695 | 1.0694 | 1.0689 | 1.0701 |
| 0.95 | 1.1 | 1.0500 | 1.0999 | 1.1000 | 1.1000 | 1.0995 |
| 0.95 | 1.1 | 1.0500 | 1.0999 | 1.1000 | 1.1000 | 1.0998 |
| 0.9 | 1.1 | 1.0780 | 0.9902 | 1.0447 | 0.9497 | 0.9595 |
| 0.9 | 1.1 | 1.0690 | 1.0436 | 0.9000 | 1.0125 | 1.0261 |
| 0.9 | 1.1 | 1.0320 | 1.0999 | 0.9863 | 1.0177 | 1.0104 |
| 0.9 | 1.1 | 1.0680 | 1.0123 | 0.9657 | 0.9717 | 0.9733 |
| 0.0 | 5.0 | 0 | 0.0018 | 5.000 | 2.2939 | 3.1194 |
| 0.0 | 5.0 | 0 | 4.8882 | 5.000 | 1.5445 | 2.3485 |
| 0.0 | 5.0 | 0 | 1.4461 | 5.000 | 2.1016 | 1.6498 |
| 0.0 | 5.0 | 0 | 4.9987 | 5.000 | 2.4704 | 4.9998 |
| 0.0 | 5.0 | 0 | 1.8570 | 5.000 | 0.8641 | 4.4746 |
| 0.0 | 5.0 | 0 | 0.0004 | 5.000 | 3.6410 | 4.9998 |
| 0.0 | 5.0 | 0 | 4.9983 | 3.8490 | 1.7289 | 4.8488 |
| 0.0 | 5.0 | 0 | 3.1354 | 5.000 | 0.77854 | 2.3917 |
| 0.0 | 5.0 | 0 | 4.9907 | 2.7434 | 1.0707 | 1.9906 |
Cost ($/h) | 901.9501 | 799.5823 | 799.0680 | 799.5753 | 799.2659 | ||
(MW) | 5.8225 | 8.7880 | 8.6245 | 8.7532 | 8.6514 | ||
(MVAR) | -4.6063 | 3.2444 | 4.1827 | 5.0820 | 4.4967 | ||
| 1.1496 | 1.0757 | 1.8583 | 1.4079 | 1.5887 | ||
Lmax | 0.1723 | 0.1270 | 0.1164 | 0.1268 | 0.1214 | ||
Elapsed time | 107.9159 | 305.0494 | 177.6250 | 149.7006 |
OPF | Optimal Power Flow |
DTBO | Driving Training-Based Optimization |
MDTBO | Modified Driving Training-Based Optimization |
IDTBO | Improved Driving Training-Based Optimization |
TLBO | Teaching Learning-Based Optimization |
PSO | Particle Swarm Optimization |
CSA | Cuckoo Search Algorithm |
IEEE | Institute of Electrical and Electronics Engineers |
DE | Differential Evolution |
ITLBO | Improved Teaching Learning-Based Optimization |
CDPSO | Crowding Distance Based Particle Swarm Optimization |
| [1] | Wael AMOR, Power flow for large and poorly conditioned networks, E. T. S., University of Quebec, 2018, pp. 43. |
| [2] | Ebeed M., Kame S., Jurado F., Optimal Power Flow Using Recent Optimization Techniques, Classical and Recent Aspects of Power System Optimization, Elsevier Inc., 2018, pp. 157-183. |
| [3] |
Emmanuel A. Nyiekaa, Ikenna Onyegbadue, Optimal Power Flow Methods – A survey, International Journal of Advances in Engineering and Manangement, vol. 3, issue 2, feb 2021, pp. 20-32.
https://ijaem.net/issue_dcp/Optimal%20Power%20Flow%20Methods%20%20A%20Survey.pdf |
| [4] | M. Abido, Optimal Power Flow Using Particle Swarm Optimization, International Journal of Electrical Power Energy System, 24, 2002, pp. 563-571. |
| [5] |
Arul Ponnusamy, Rengarajan N., Optimal Power Flow Solution using Cuckoo Search Algorithm, ARPN Journal of Engineering and Applied Sciences, vol. 9, no. 12, December 2014, pp. 2687-2691.
https://www.arpnjournals.com/jeas/research_papers/rp_2014/jeas_1214_1382.pdf |
| [6] | Bouchekara H., Abido M., Boucherma M., Optimal power flow using teaching-learning based optimization technique, Electr. Power Syst. Res., 114, 2014, pp. 49-59. |
| [7] | O. M. Ranarison, E. Randriamora, H. Andriatsihoarana, Optimal Power Flow Using Modified Driving-Training Based Optimization algorithm, International Journal of Advances in Engineering and Management, vol. 7, Issue 02 Feb. 2025, pp. 846-860. |
| [8] | Juan Li, Qing An, Hong Lei, Qian Deng, Gai-Ge Wang, Survey of Levy Flight-Based Metaheuristic for Optimization, Mathematics 10, no. 15: 2785, 2022. |
| [9] | Edmond Randriamora, Faly Ramahatana, Yvon Andrianaharison, Optimal Power Flow by Cuckoo Search Via Levy Flight Algorithm, International Journal of Engineering Research & Technology, vol. 6, Issue 12, December 2017, pp. 32-37. |
| [10] | Ghasemi M., Ghavidel S., Gitizadeh M., Akbari E., An improved teaching learning based optimization algorithm using Levy mutation strategy for non-smooth optimal power flow, Int. J. Electr. Power Energy Syst. 65, 2015, pp. 375-384. |
| [11] | Dr. K. Lenin, Crowding Distance Based Particle Swarm Optimization Algorithm for Solving Optimal Reactive Power Dispatch Problem, International Journal of Research Granthaalayah, vol. 6, Issue 6, June 2018, pp. 226-237. |
| [12] | Mohammad Dehghani, Eva Trojovská, Pavel Trojovský, A new human-based metaheuristic algorithm for solving optimization problems on the base of simulation of driving training process, Scientific reports, 2022. |
| [13] | Daniel Kwegyir, Michael Dugbartey Terkper, Francis Boafo Effah, Emmanuel Kwaku Antoh, Stacy Gyamfuah Lumor, Improved Driving Training-Based Optimization Algorithm Using Levy Flight and Crowding Distance Techniques, Research Reports on Computer Science, vol. 3, Issue 1, April 2024, pp. 12-28. |
| [14] | Deb K., Pratap A., Agarwal S., Meyarivan T., A fast and elitist multiobjective genetic algorithm: NSGA-II, IEEE Trans. Evol. Comput., 2002, 6, pp. 182-197. |
| [15] | Bechikh S., Kessentini M., Said L. B., Ghédira K., Preference incorporation in evolutionary multiobjective optimization: A survey of the state-of-the-art, Adv. Comput., 2015, 98, pp. 141-207. |
| [16] | Gao Y., Zhang H., Duan Y., A novel hybrid PSO based on levy flight and wavelet mutation for global optimization, PLOS ONE, 18, e0279572, 2023. |
| [17] | Kamaruzaman A. F., Zain A. M., Yusuf S. M., Udin A., Levy Flight Algorithm for Optimization Problems – A Literature Review, Appl. Mech. Mater, 421, 2013, pp. 496-501. |
| [18] | Chawla M., Duhan M., Levy Flights in Metaheuristics Optimization Algorithms – A Review, Appl. Artif. Intell., 32, 2018, pp. 802-821. |
| [19] | Abou El Ela A. A, Abido M. A, Optimal power flow using differential evolution algorithm, Electr. Power Syst. Res., 80(7), 2010, pp. 878-885. |
| [20] | Alsac O., Stot B., Optimal load flow with steady-state security, IEEE Trans. Power App. Syst., PAS-93 (3), 1974, pp. 745-751. |
APA Style
Randriamora, E., Ranarison, O. M., Randriamaroson, R. M. (2026). Improved Driving Training-Based Optimization Algorithm Using Levy Flight and Crowding Distance Techniques for Solving Optimal Power Flow Problem. American Journal of Engineering and Technology Management, 11(3), 31-41. https://doi.org/10.11648/j.ajetm.20261103.11
ACS Style
Randriamora, E.; Ranarison, O. M.; Randriamaroson, R. M. Improved Driving Training-Based Optimization Algorithm Using Levy Flight and Crowding Distance Techniques for Solving Optimal Power Flow Problem. Am. J. Eng. Technol. Manag. 2026, 11(3), 31-41. doi: 10.11648/j.ajetm.20261103.11
@article{10.11648/j.ajetm.20261103.11,
author = {Edmond Randriamora and Olivier Mickael Ranarison and Rivo Mahandrisoa Randriamaroson},
title = {Improved Driving Training-Based Optimization Algorithm Using Levy Flight and Crowding Distance Techniques for Solving Optimal Power Flow Problem},
journal = {American Journal of Engineering and Technology Management},
volume = {11},
number = {3},
pages = {31-41},
doi = {10.11648/j.ajetm.20261103.11},
url = {https://doi.org/10.11648/j.ajetm.20261103.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajetm.20261103.11},
abstract = {Driving Training-Based Optimization (DTBO) algorithm is a metaheuristic algorithm based on the simulation of driving training process. Improved version of the DTBO is proposed in this paper for solving Optimal Power Flow (OPF) problem. The Improved Driving Training-Based Optimization (IDTBO) algorithm includes the Crowding Distance Technique for more diverse driver and learner selection and incorporates the Levy Flight distribution for better exploration and local optima avoidance. OPF is considered as one of the most difficult optimization problems and is very important for the control of electrical network. The objective of this study is finding the best control variables while minimizing the total generation fuel cost and considering equality and inequality constraints of the system. The standard IEEE 30-bus network is used for evaluating the performance of the IDTBO algorithm for solving OPF problem. For solving conventional power flow equation, Newton Raphson algorithm is considered. Compared to Modified Driving Training-Based Optimization (MDTBO), Teaching Learning-Based Optimization (TLBO) and Particle Swarm Optimization (PSO) algorithms, the proposed method is more accurate and is better in convergence speed. The performance of the IDTBO is very useful for finding the most secure operating point of any electric power system and its convergence speed contributes to improving the dynamic management of a smart electricity grid.},
year = {2026}
}
TY - JOUR T1 - Improved Driving Training-Based Optimization Algorithm Using Levy Flight and Crowding Distance Techniques for Solving Optimal Power Flow Problem AU - Edmond Randriamora AU - Olivier Mickael Ranarison AU - Rivo Mahandrisoa Randriamaroson Y1 - 2026/05/14 PY - 2026 N1 - https://doi.org/10.11648/j.ajetm.20261103.11 DO - 10.11648/j.ajetm.20261103.11 T2 - American Journal of Engineering and Technology Management JF - American Journal of Engineering and Technology Management JO - American Journal of Engineering and Technology Management SP - 31 EP - 41 PB - Science Publishing Group SN - 2575-1441 UR - https://doi.org/10.11648/j.ajetm.20261103.11 AB - Driving Training-Based Optimization (DTBO) algorithm is a metaheuristic algorithm based on the simulation of driving training process. Improved version of the DTBO is proposed in this paper for solving Optimal Power Flow (OPF) problem. The Improved Driving Training-Based Optimization (IDTBO) algorithm includes the Crowding Distance Technique for more diverse driver and learner selection and incorporates the Levy Flight distribution for better exploration and local optima avoidance. OPF is considered as one of the most difficult optimization problems and is very important for the control of electrical network. The objective of this study is finding the best control variables while minimizing the total generation fuel cost and considering equality and inequality constraints of the system. The standard IEEE 30-bus network is used for evaluating the performance of the IDTBO algorithm for solving OPF problem. For solving conventional power flow equation, Newton Raphson algorithm is considered. Compared to Modified Driving Training-Based Optimization (MDTBO), Teaching Learning-Based Optimization (TLBO) and Particle Swarm Optimization (PSO) algorithms, the proposed method is more accurate and is better in convergence speed. The performance of the IDTBO is very useful for finding the most secure operating point of any electric power system and its convergence speed contributes to improving the dynamic management of a smart electricity grid. VL - 11 IS - 3 ER -
Doctoral School of Science and Engineering Techniques and Innovation, University of Antananarivo, Antananarivo, Madagascar
Doctoral School of Science and Engineering Techniques and Innovation, University of Antananarivo, Antananarivo, Madagascar
Doctoral School of Science and Engineering Techniques and Innovation, University of Antananarivo, Antananarivo, Madagascar
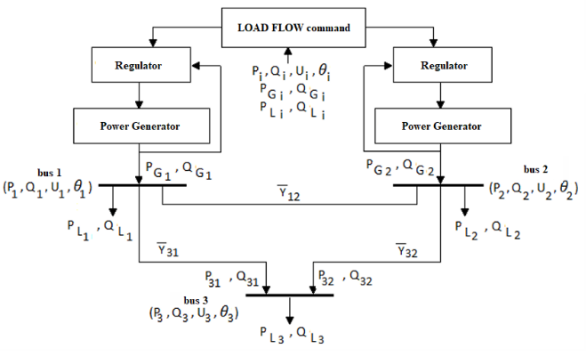
Figure 1. Power control in an electrical network.
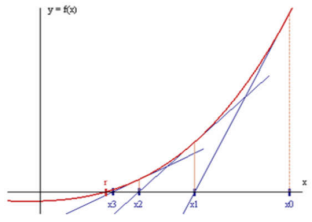
Figure 2. Iterative method of Newton-Raphson.

Figure 3. Main idea of DTBO.
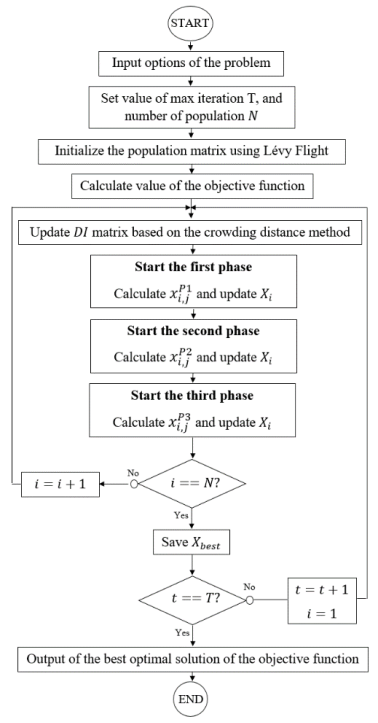
Figure 4. Flowchart of IDTBO.
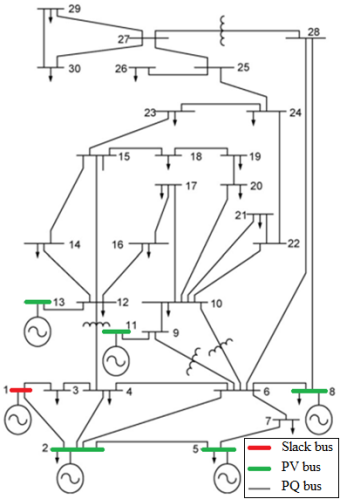
Figure 5. IEEE 30-bus system.
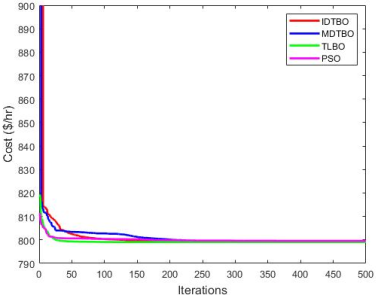
Figure 6. Fuel cost variation with IDTBO, MDTBO, TLBO and PSO.
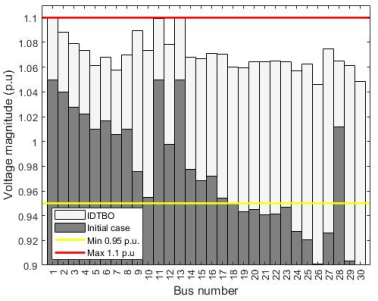
Figure 7. System voltage profiles for initial case and IDTBO.
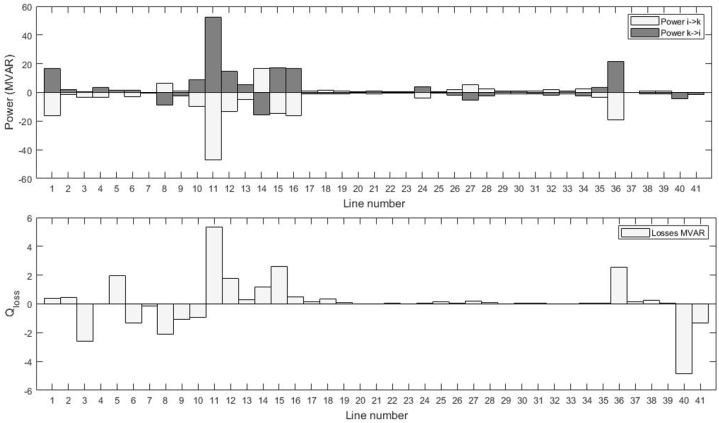
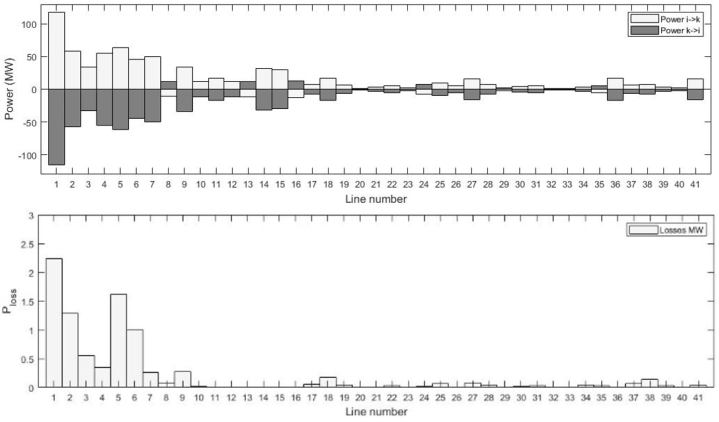
Figure 9. Reactive power flow and losses through transmission lines with IDTBO.
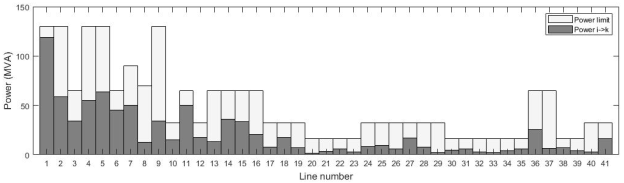
Figure 10. Apparent power flow through transmission lines with IDTBO.
Information

